
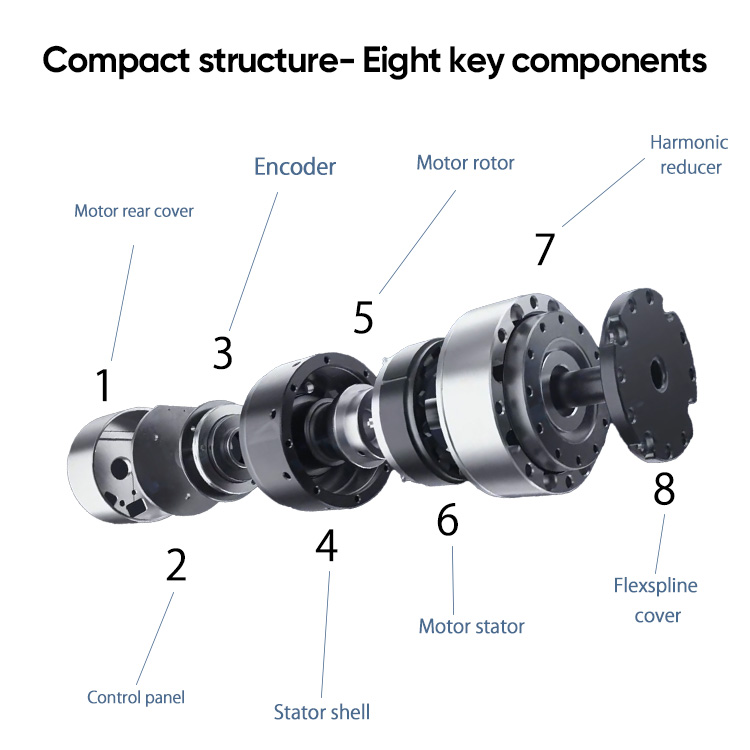
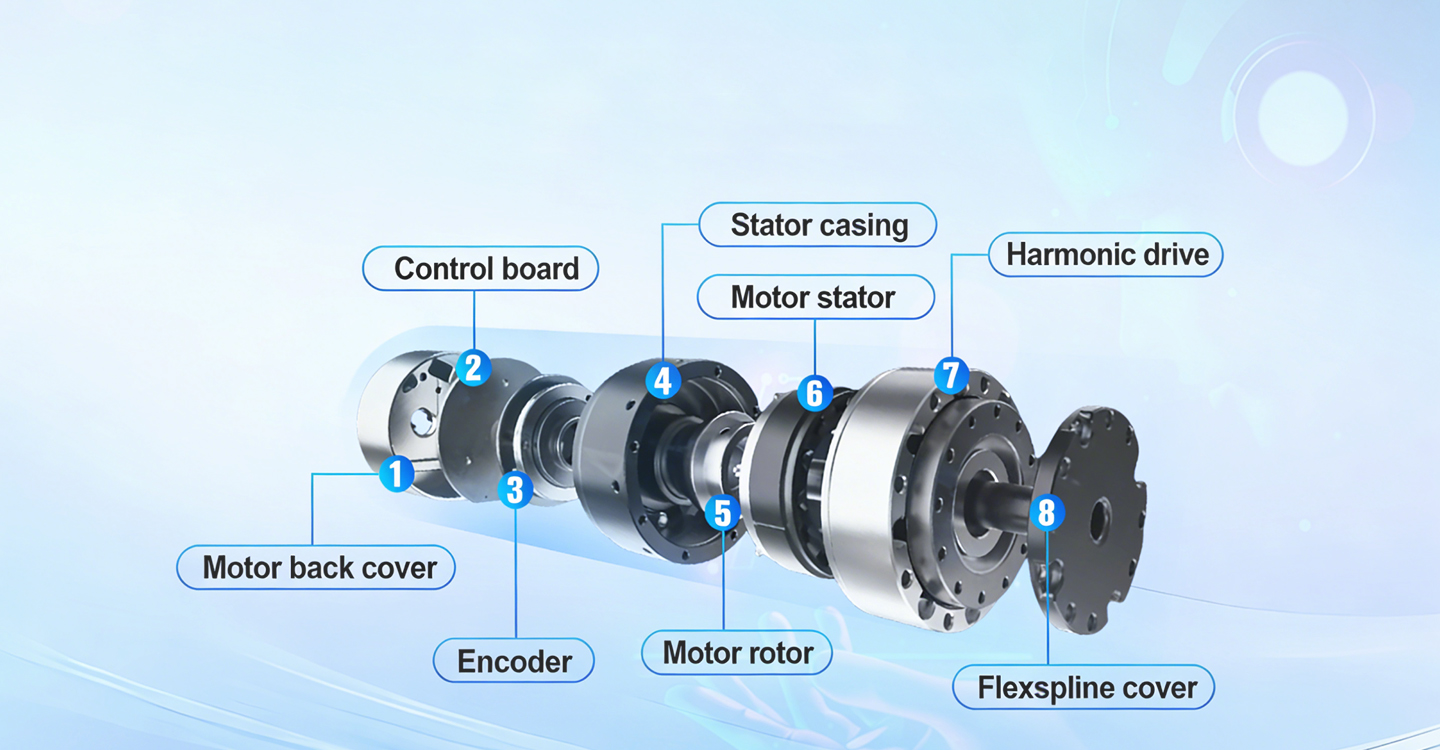
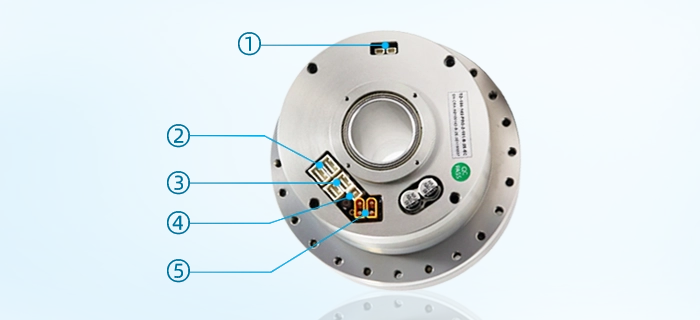
The TD Series Robot Joint Actuator is a compact and lightweight integrated robotic joint actuator featuring an ultra-thin harmonic drive reducer, FOC servo controller, high-efficiency brushless torque motor, integrated brake, and high-precision multi-turn absolute encoder within a single highly integrated module. It delivers high torque density, precise motion control, and reliable performance for advanced robotic applications such as humanoid robots, quadruped robots, collaborative robots, and intelligent automation equipment.
Max rated torque: 363NM
Peak Speed : 108RPM
Rated Voltage: 24-48V
Communication: Canopen, Canbus, Ethercat



| Model | Ratio | Start-stop peak Torque (N.m) | Max. allowable torque at average load (N.m) | Rated torque at 2000rpm/ (reduction ratio)(Nm) | Rated speed (RPM) (With 1/2 rated torque) |
Outer diamter (mm) |
Length (mm) | Weight (Kg) |
Hole (mm) |
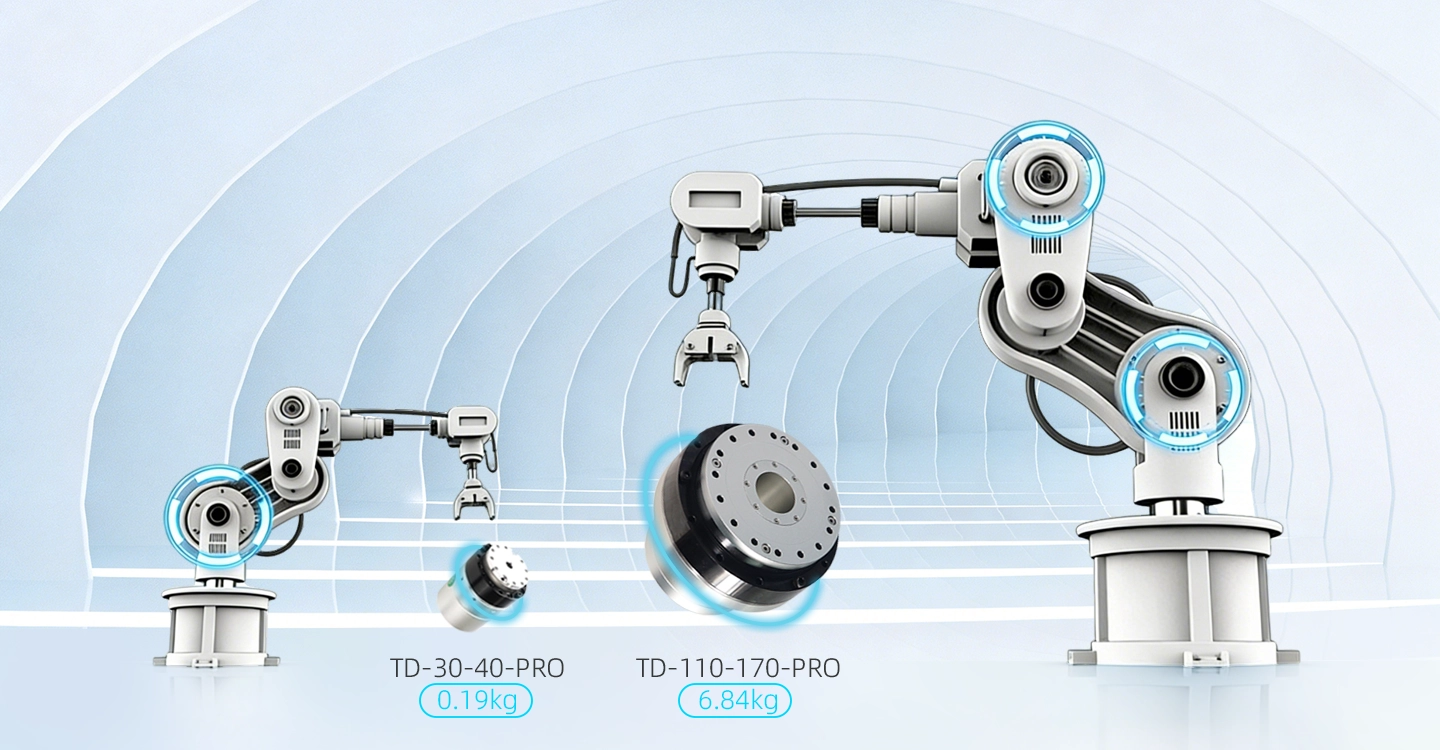
| TD-30-40-PRO-XX | 51/101 | 3.3/4.8 | 2.3/3.3 | 1.8/2.4 | 90/45 | 40 | 60 | 0.19 | 6 |
| TD-40-52-PRO-XX | 51/101 | 8.3/11 | 5.5/8.9 | 3.5/5 | 80/40 | 52 | 62 | 0.32 | 12 |
| TD-50-60-PRO-XX | 51/81/101 | 23/29/34 | 8.6/13.5/13.5 | 6.6/9.6/9.6 | 75/46/37 | 60 | 63 | 0.45 | 12 |
| TD-50-70-PRO-XX | 51/81/101 | 23/29/34 | 8.6/13.5/13.5 | 6.6/9.6/9.6 | 75/46/37 | 70 | 63 | 0.66 | 12 |
| TD-60-70-PRO-XX | 51/81/101/121 | 42/53/66/66 | 32/33/49/49 | 19.8/27.5/30/30 | 68/43/34/24 | 70 | 72.5 | 0.73 | 18 |
| TD-60-80-PRO-XX | 51/81/101/121 | 42/53/66/66 | 32/33/49/49 | 19.8/27.5/30/30 | 68/43/34/24 | 80 | 72.5 | 1.03 | 18 |
| TD-70-80-PRO-XX | 51/81/101/121 | 63/91/102/108 | 42/58/61/61 | 32/42/50/50 | 61/38/30/25 | 80 | 73 | 0.90 | 18 |
| TD-70-90-PRO-XX | 51/81/101/121 | 63/91/102/108 | 42/58/61/61 | 32/42/50/50 | 61/38/30/25 | 90 | 73.5 | 1.27 | 18 |
| TD-80-97-PRO-XX | 51/81/101/121/161 | 121/169/194/207/217 | 68.5/107/133/133/133 | 48/78/84/84/84 | 54/35/27/23/17 | 97 | 85.5 | 1.50 | 27 |
| TD-80-110-PRO-XX | 51/81/101/121/161 | 121/169/194/207/217 | 68.5/107/133/133/133 | 48/78/84/84/84 | 54/35/27/23/17 | 110 | 85.5 | 2.06 | 27 |
| TD-100-120-PRO-XX | 51/81/101/121/161 | 267/376/411/436/459 | 133/206/267/267/267 | 94/146/169/169/169 | 44/29/22/18/12 | 120 | 100.5 | 2.52 | 32 |
| TD-100-142-PRO-XX | 51/81/101/121/161 | 267/376/411/436/459 | 133/206/267/267/267 | 94/146/169/169/169 | 44/29/22/18/12 | 142 | 100.5 | 3.96 | 32 |
| TD-110-170-PRO-XX | 51/81/101/121/161 | 497/641/702/762/800 | 242/351/460/557/557 | 169/255/328/363/363 | 22/15/12/10/7 | 170 | 121.7 | 6.84 | 40 |

1. Advanced eddy current encoder technology ensures highly stable and accurate position feedback for robotic motion control.
2. 17-bit multi-turn absolute encoder (CAN version) with positioning accuracy up to 0.05°, enabling precise joint positioning.
3. 16-bit + 18-bit dual encoder configuration (EtherCAT version) provides enhanced feedback redundancy and improves positioning accuracy to better than 0.03°, ideal for high-precision robotic joint control.
1. EtherCAT high-speed industrial communication protocol for real-time motion control in advanced robotic systems.
2. CANopen protocol for reliable and flexible integration with robotic controllers.
3. CAN Bus communication supporting stable multi-axis robotic actuator networks.
4. Self-developed force-control servo driver, enabling precise torque control for advanced robot joint actuator applications.
1. Integrated permanent magnet brake designed for robotic joint safety and reliability.
2. Rapid motor stop capability for fast response during emergency or control commands.
3.Automatic position locking when power is suddenly lost, ensuring stable joint holding.
4.Low-noise brake design, improving overall operational smoothness of the robotic actuator.
1. High magnetic saturation alloy materials to maximize electromagnetic performance.
Automotive-grade anti-static protection and military-grade anti-vibration design for improved durability.
2. Block-type stator winding structure to enhance motor efficiency and torque output.
3. Optimized large air-gap rotor design to improve torque density and dynamic performance.
4. Lightweight actuator housing reducing overall robotic joint weight.
1. High-torque-density frameless motor design delivering greater output performance with lower power consumption.
2. Ultra-lightweight motor structure optimized for compact robotic joint actuator modules used across multiple robotic platforms.
1. Compact and standardized actuator interface, enabling easier integration into robotic joints and automation equipment.
2. Modular design architecture compatible with different robotic systems and actuator configurations.
Poduct Application

Robot dog

Humanoid robot

Miniature robotic arm
Intelligent automation equipment
| Model | TD-30-40-PRO-XX | TD-30-40-PRO-XXB | TD-40-52-PRO-XX | TD-40-52-PRO-XXB | TD-50-60-PRO-XX | TD-50-60-PRO-XXB |
| Ratio | 51/101 | 51/101 | 51/101 | 51/101 | 51/81/101 | 51/81/101 |
| Start-stop peak Torque (N.m) | 3.3/4.8 | 3.3/4.8 | 8.3/11 | 8.3/11 | 23/29/34 | 23/29/34 |
| Max. allowable torque at average load (N.m) | 2.3/3.3 | 2.3/3.3 | 5.5/8.9 | 5.5/8.9 | 8.6/13.5/13.5 | 8.6/13.5/13.5 |
| Rated torque at 2000rpm/ (reduction ratio)(Nm) | 1.8/2.8 | 1.8/2.8 | 4/6.5 | 4/6.5 | 6.6/9.6/9.6 | 6.6/9.6/9.6 |
| OutpuT Peak Speed (RPM) | 118/59 | 118/59 | 118/59 | 118/59 | 97/61/49 | 97/61/49 |
| Rated speed (RPM) | 90/45 | 90/45 | 80/40 | 80/40 | 75/46/37 | 75/46/37 |
| Motor power (W) | 36 | 36 | 90 | 90 | 150 | 150 |
| Supply voltage (V) | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 |
| Rated current (A) | 1 | 1 | 2 | 2 | 3.6 | 3.6 |
| Max. continuous current(A) | 2 | 2 | 3 | 3 | 5 | 5 |
| Encoder Resoluton (Bit) | 17 | 17 | 17 | 17 | 17 | 17 |
| Backlash (arcsec) | 40 | 40 | 40 | 40 | 20/20/10 | 20/20/10 |
| communication bus | CAN | CAN | CAN | CAN | CAN | CAN |
| Length(mm) | 59.5±0.5 | 78.1±0.5 | 60.3±0.5 | 80.4±0.5 | 60±0.5 | 82±0.5 |
| Through hole(mm) | 6 | 6 | 12 | 12 | 12 | 12 |
| Weight(kg) | 0.18 | 0.23 | 0.3 | 0.38 | 0.42 | 0.59 |
| Torque constant(N.m/A) | 0.024 | 0.024 | 0.05 | 0.05 | 0.089 | 0.089 |
| Resistance(ohm) | 0.024 | 0.024 | 1.96 | 1.96 | 0.47 | 0.47 |
| Inductance(mH) | 0.409 | 0.409 | 0.788 | 0.788 | 0.215 | 0.215 |
| Number of pole-pairs | 7 | 7 | 7 | 7 | 10 | 10 |
| Inertia(g * c㎡) | 24 | 24 | 82 | 127 | 112 | 146 |
| Model | TD-50-70-PRO-XX | TD-50-70-PRO-XXB | TD-60-70-PRO-XX | TD-60-70-PRO-XXB | TD-60-80-PRO-XX | TD-60-80-PRO-XXB |
| Ratio | 51/81/101 | 51/81/101 | 51/81/101/121 | 51/81/101/121 | 51/81/101/121 | 51/81/101/121 |
| Start-stop peak Torque (N.m) | 23/29/34 | 23/29/34 | 42/53/66/66 | 42/53/66/66 | 42/53/66/66 | 42/53/66/66 |
| Max. allowable torque at average load (N.m) | 8.6/13.5/13.5 | 8.6/13.5/13.5 | 32/33/49/49 | 32/33/49/49 | 32/33/49/49 | 32/33/49/49 |
| Rated torque at 2000rpm/ (reduction ratio) | 6.6/9.6/9.6 | 6.6/9.6/9.6 | 19.8/27.5/30/30 | 19.8/27.5/30/30 | 19.8/27.5/30/30 | 19.8/27.5/30/30 |
| Output Peak Speed (RPM) | 97/61/49 | 97/61/49 | 82/51/41/32 | 82/51/41/32 | 82/51/41/32 | 82/51/41/32 |
| Rated speed (RPM) | 75/46/37 | 75/46/37 | 68/43/34/24 | 68/43/34/24 | 68/43/34/24 | 68/43/34/24 |
| Motor power (W) | 150 | 150 | 300 | 300 | 300 | 300 |
| Supply voltage (V) | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 |
| Rated current (A) | 3.6 | 3.6 | 5 | 5 | 5 | 5 |
| Max. continuous current(A) | 5 | 5 | 6.7 | 6.7 | 6.7 | 6.7 |
| Encoder Resolution (Bit) | 17 | 17 | 17 | 17 | 17 | 17 |
| Backlash (arcsec) | 20/20/10 | 20/20/10 | 20/20/10/10 | 20/20/10/10 | 20/20/10/10 | 20/20/10/10 |
| communication bus | CAN | CAN | CAN | CAN | CAN | CAN |
| Length(mm) | 60±0.5 | 81.7±0.5 | 71.5±0.5 | 91.2±0.5 | 70.9±0.5 | 89.9±0.5 |
| Through hole(mm) | 12 | 12 | 18 | 18 | 18 | 18 |
| Weight(kg) | 0.63 | 0.8 | 0.69 | 0.84 | 1.01 | 1.17 |
| Torque constant(N.m/A) | 0.089 | 0.089 | 0.096 | 0.096 | 0.096 | 0.096 |
| Resistance(ohm) | 0.47 | 0.47 | 0.33 | 0.33 | 0.33 | 0.33 |
| Inductance(mH) | 0.215 | 0.215 | 0.074 | 0.074 | 0.074 | 0.074 |
| Number of pole-pairs | 10 | 10 | 10 | 10 | 10 | 10 |
| Inertia(g * c㎡) | 124 | 147 | 382 | 538 | 441 | 595 |
| Model | TD-70-80-PRO-XX | TD-70-80-PRO-XXB | TD-70-90-PRO-XX | TD-70-90-PRO-XXB | TD-80-110-PRO-XX | TD-80-110-PRO-XXB |
| Ratio | 51/81/101/121 | 51/81/101/121 | 51/81/101/121 | 51/81/101/121 | 51/81/101/121/161 | 51/81/101/121/161 |
| Start-stop peak Torque (N.m) | 63/91/102/108 | 63/91/102/108 | 63/91/102/108 | 63/91/102/108 | 121/169/194/207/217 | 121/169/194/207/217 |
| Max. allowable torque at average load (N.m) | 42/58/61/61 | 42/58/61/61 | 42/58/61/61 | 42/58/61/61 | 68.5/107/133/133/133 | 68.5/107/133/133/133 |
| Rated torque at 2000rpm/ (reduction ratio) | 32/42/50/50 | 32/42/50/50 | 32/42/50/50 | 32/42/50/50 | 48/78/84/84/84 | 48/78/84/84/84 |
| Output Peak Speed (RPM) | 77/48/40/30 | 77/48/40/30 | 77/48/40/30 | 77/48/40/30 | 65/43/36/30/22 | 65/43/36/30/22 |
| Rated speed (RPM) | 61/38/30/25 | 61/38/30/25 | 61/38/30/25 | 61/38/30/25 | 54/35/27/23/17 | 54/35/27/23/17 |
| Motor power (W) | 500 | 500 | 500 | 500 | 750 | 750 |
| Supply voltage (V) | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 |
| Rated current (A) | 6.1 | 6.1 | 6.1 | 6.1 | 9 | 9 |
| Max. continuous current(A) | 8.4 | 8.4 | 8.4 | 8.4 | 10.4 | 10.4 |
| Encoder Resolution (Bit) | 17 | 17 | 17 | 17 | 17 | 17 |
| Backlash (arcsec) | 20/20/10/10 | 20/20/10/10 | 20/20/10/10 | 20/20/10/10 | 20/20/10/10/10 | 20/20/10/10/10 |
| communication bus | CAN | CAN | CAN | CAN | CAN | CAN |
| Length(mm) | 71.4±0.5 | 89.9±0.5 | 71.9±0.5 | 90.4±0.5 | 83.9±0.5 | 103.9±0.5 |
| Through hole(mm) | 18 | 18 | 18 | 18 | 27 | 27 |
| Weight(kg) | 0.95 | 1.3 | 1.3 | 1.6 | 2.1 | 2.6 |
| Torque constant(N.m/A) | 0.118 | 0.118 | 0.118 | 0.118 | 0.143 | 0.143 |
| Resistance(ohm) | 0.38 | 0.38 | 0.38 | 0.38 | 0.13 | 0.13 |
| Inductance(mH) | 0.33 | 0.33 | 0.33 | 0.33 | 0.25 | 0.25 |
| Number of pole-pairs | 10 | 10 | 10 | 10 | 8 | 8 |
| Inertia(g * c㎡) | 569 | 679 | 594 | 682 | 1255 | 1484 |
| Model | TD-100-120-PRO-XX | TD-100-120-PRO-XXB | TD-100-142-PRO-XX | TD-100-142-PRO-XXB | TD-110-170-PRO-XX | TD-110-170-PRO-XXB |
| Ratio | 51/81/101/121/161 | 51/81/101/121/161 | 51/81/101/121/161 | 51/81/101/121/161 | 51/121/161 | 51/121/161 |
| Start-stop peak Torque (N.m) | 267/376/411/436/459 | 267/376/411/436/459 | 267/376/411/436/459 | 267/376/411/436/459 | 523/802/841 | 523/802/841 |
| Max. allowable torque at average load (N.m) | 133/206/267/267/267 | 133/206/267/267/267 | 133/206/267/267/267 | 120/185/267/267/267 | 255/586/586 | 255/586/586 |
| Rated torque at 2000rpm/ (reduction ratio) | 94/146/169/169/169 | 94/146/169/169/169 | 94/146/169/169/169 | 94/146/169/169/169 | 169/363/363 | 169/363/363 |
| Output Peak Speed (RPM) | 55/37/29/24/18 | 55/37/29/24/18 | 55/37/29/24/18 | 55/37/29/24/18 | 34/14/10 | 34/14/10 |
| Rated speed (RPM) | 44/29/22/18/12 | 44/29/22/18/12 | 44/29/22/18/12 | 44/29/22/18/12 | 2022/12/7 | 2022/12/7 |
| Motor power (W) | 1000 | 1000 | 1000 | 1000 | 1500 | 1500 |
| Supply voltage (V) | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 |
| Rated current (A) | 15.8 | 15.8 | 15.8 | 15.8 | 14.1 | 14.1 |
| Max. continuous current(A) | 20.2 | 20.2 | 16.9 | 16.9 | 30.2 | 30.2 |
| Encoder Resolution (Bit) | 17 | 17 | 17 | 17 | 17 | 17 |
| Backlash (arcsec) | 20/20/10/10/10 | 20/20/10/10/10 | 20/20/10/10/10 | 20/20/10/10/10 | 20/20/10 | 20/20/10 |
| communication bus | CAN | CAN | CAN | CAN | CAN | CAN |
| Length(mm) | 100.5±0.5 | 121.5±0.5 | 100.5±0.5 | 121.5±0.5 | 121.7±0.5 | 144.7±0.5 |
| Through hole(mm) | 32 | 32 | 32 | 32 | 40 | 40 |
| Weight(kg) | 2.52 | 3.21 | 3.8 | 4.5 | 6.85 | 7.5 |
| Torque constant(N.m/A) | 0.175 | 0.175 | 0.175 | 0.175 | 0.293 | 0.293 |
| Resistance(ohm) | 0.07 | 0.07 | 0.12 | 0.12 | 0.23 | 0.23 |
| Inductance(mH) | 0.184 | 0.184 | 0.3 | 0.3 | 0.25 | 0.25 |
| Number of pole-pairs | 10 | 10 | 10 | 10 | 15 | 15 |
| Inertia(g * c㎡) | 3910 | 4744 | 3601 | 4237 | 9242 | 11751 |
| Model | TD-30-40-PRO-XX | TD-30-40-PRO-XXB | TD-40-52-PRO-XX | TD-40-52-PRO-XXB | TD-50-60-PRO-XX | TD-50-60-PRO-XXB |
| Ratio | 51/101 | 51/101 | 51/101 | 51/101 | 51/81/101 | 51/81/101 |
| Start-stop peak Torque (N.m) | 3.3/4.8 | 3.3/4.8 | 8.3/11 | 8.3/11 | 23/29/34 | 23/29/34 |
| Max. allowable torque at average load (N.m) | 2.3/3.3 | 2.3/3.3 | 5.5/8.9 | 5.5/8.9 | 8.6/13.5/13.5 | 8.6/13.5/13.5 |
| Rated torque at 2000rpm/ (reduction ratio)(Nm) | 1.8/2.8 | 1.8/2.8 | 4/6.5 | 4/6.5 | 6.6/9.6/9.6 | 6.6/9.6/9.6 |
| OutpuT Peak Speed (RPM) | 118/59 | 118/59 | 118/59 | 118/59 | 97/61/49 | 97/61/49 |
| Rated speed (RPM) | 90/45 | 90/45 | 80/40 | 80/40 | 75/46/37 | 75/46/37 |
| Motor power (W) | 36 | 36 | 90 | 90 | 150 | 150 |
| Supply voltage (V) | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 |
| Rated current (A) | 1 | 1 | 2 | 2 | 3.6 | 3.6 |
| Max. continuous current(A) | 2 | 2 | 3 | 3 | 5 | 5 |
| Encoder Resoluton (Bit) | 16 / 18 | 16 / 18 | 16 / 18 | 16 / 18 | 16 / 18 | 16 / 18 |
| Backlash (arcsec) | 40 | 40 | 40/30 | 40/30 | 20/20/10 | 20/20/10 |
| communication bus | Ethercat | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus |
| Motor length with (Dual encoders/mm) | 60.5±0.5 | 78.1±0.5 | 64.5±0.5 | 84.5±0.5 | 60±0.5 | 82±0.5 |
| Through hole(mm) | 6 | 6 | 12 | 12 | 13 | 10 |
| Weight(kg) | 0.18 | 0.23 | 0.3 | 0.38 | 0.42 | 0.59 |
| Torque constant(N.m/A) | 0.024 | 0.024 | 0.05 | 0.05 | 0.089 | 0.089 |
| Resistance(Ω) | 2.08 | 2.08 | 1.96 | 1.96 | 0.47 | 0.47 |
| Inductance(mH) | 0.409 | 0.409 | 0.788 | 0.788 | 0.215 | 0.215 |
| Number of pole-pairs | 7 | 7 | 7 | 7 | 10 | 10 |
| Inertia(g * c㎡) | 24 | 24 | 82 | 127 | 112 | 146 |
| Model | TD-50-70-PRO-XX | TD-50-70-PRO-XXB | TD-60-70-PRO-XX | TD-60-70-PRO-XXB | TD-60-80-PRO-XX | TD-60-80-PRO-XXB |
| Ratio | 51/81/101 | 51/81/101 | 51/81/101/121 | 51/81/101/121 | 51/81/101/121 | 51/81/101/121 |
| Start-stop peak Torque (N.m) | 23/29/34 | 23/29/34 | 42/53/66/66 | 42/53/66/66 | 42/53/66/66 | 42/53/66/66 |
| Max. allowable torque at average load (N.m) | 8.6/13.5/13.5 | 8.6/13.5/13.5 | 32/33/49/49 | 32/33/49/49 | 32/33/49/49 | 32/33/49/49 |
| Rated torque at 2000rpm/ (reduction ratio) | 6.6/9.6/9.6 | 6.6/9.6/9.6 | 19.8/27.5/30/30 | 19.8/27.5/30/30 | 19.8/27.5/30/30 | 19.8/27.5/30/30 |
| Output Peak Speed (RPM) | 97/61/49 | 97/61/49 | 82/51/41/32 | 82/51/41/32 | 82/51/41/32 | 82/51/41/32 |
| Rated speed (RPM) | 75/46/37 | 75/46/37 | 68/43/34/24 | 68/43/34/24 | 68/43/34/24 | 68/43/34/24 |
| Motor power (W) | 150 | 150 | 300 | 300 | 300 | 300 |
| Supply voltage (V) | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 |
| Rated current (A) | 3.6 | 3.6 | 5 | 5 | 5 | 5 |
| Max. continuous current(A) | 5 | 5 | 6.7 | 6.7 | 6.7 | 6.7 |
| Encoder Resolution (Bit) | 16 / 18 | 16 / 18 | 16 / 18 | 16 / 18 | 16 / 18 | 16 / 18 |
| Backlash (arcsec) | 20/20/10 | 20/20/10 | 20/20/10/10 | 20/20/10/10 | 20/20/10/10 | 20/20/10/10 |
| communication bus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus |
| Motor length with (Dual encoders/mm) | 65.6±0.5 | 84.6±0.5 | 74±0.5 | 94±0.5 | 70.9±0.05 | 93±0.5 |
| Through hole(mm) | 13 | 13 | 18 | 18 | 18 | 18 |
| Weight(kg) | 0.63 | 0.8 | 0.65 | 0.84 | 1.01 | 1.17 |
| Torque constant(N.m/A) | 0.089 | 0.089 | 0.096 | 0.096 | 0.096 | 0.096 |
| Resistance(Ω) | 0.47 | 0.47 | 0.33 | 0.33 | 0.33 | 0.33 |
| Inductance(mH) | 0.215 | 0.215 | 0.074 | 0.074 | 0.074 | 0.074 |
| Number of pole-pairs | 10 | 10 | 10 | 10 | 10 | 10 |
| Inertia(g * c㎡) | 124 | 147 | 382 | 538 | 441 | 595 |
| Model | TD-70-80-PRO-XX | TD-70-80-PRO-XXB | TD-70-90-PRO-XX | TD-70-90-PRO-XXB | TD-80-110-PRO-XX | TD-80-110-PRO-XXB |
| Ratio | 51/81/101/121 | 51/81/101/121 | 51/81/101/121 | 51/81/101/121 | 51/81/101/121/161 | 51/81/101/121/161 |
| Start-stop peak Torque (N.m) | 63/91/102/108 | 63/91/102/108 | 63/91/102/108 | 63/91/102/108 | 121/169/194/207/217 | 121/169/194/207/217 |
| Max. allowable torque at average load (N.m) | 42/58/61/61 | 42/58/61/61 | 42/58/61/61 | 42/58/61/61 | 68.5/107/133/133/133 | 68.5/107/133/133/133 |
| Rated torque at 2000rpm/ (reduction ratio) | 32/42/50/50 | 32/42/50/50 | 32/42/50/50 | 32/42/50/50 | 48/78/84/84/84 | 48/78/84/84/84 |
| Output Peak Speed (RPM) | 77/48/40/30 | 77/48/40/30 | 77/48/40/30 | 77/48/40/30 | 65/43/36/30/22 | 65/43/36/30/22 |
| Rated speed (RPM) | 61/38/30/25 | 61/38/30/25 | 61/38/30/25 | 61/38/30/25 | 54/35/27/23/17 | 54/35/27/23/17 |
| Motor power (W) | 500 | 500 | 500 | 500 | 750 | 750 |
| Supply voltage (V) | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 |
| Rated current (A) | 6.1 | 6.1 | 6.1 | 6.1 | 9 | 9 |
| Max. continuous current(A) | 8.4 | 8.4 | 8.4 | 8.4 | 10.4 | 10.4 |
| Encoder Resolution (Bit) | 16 / 18 | 16 / 18 | 16 / 18 | 16 / 18 | 16 / 18 | 16 / 18 |
| Backlash (arcsec) | 20/20/10/10 | 20/20/10/10 | 20/20/10/10 | 20/20/10/10 | 20/20/10/10/10 | 20/20/10/10/10 |
| communication bus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus |
| Motor length with (Dual encoders/mm) | 75±0.5 | 93.5±0.5 | 75.5±0.5 | 94±0.5 | 85.5±0.5 | 107±0.5 |
| Through hole(mm) | 18 | 18 | 18 | 18 | 25 | 25 |
| Weight(kg) | 0.95 | 1.3 | 1.3 | 1.6 | 2.1 | 2.6 |
| Torque constant(N.m/A) | 0.118 | 0.118 | 0.118 | 0.118 | 0.143 | 0.143 |
| Resistance(ohm) | 0.38 | 0.38 | 0.38 | 0.38 | 0.13 | 0.21 |
| Inductance(mH) | 0.33 | 0.33 | 0.33 | 0.33 | 0.25 | 0.25 |
| Number of pole-pairs | 10 | 10 | 10 | 10 | 8 | 8 |
| Inertia(g * c㎡) | 569 | 679 | 594 | 682 | 1255 | 1484 |
| Model | TD-100-120-PRO-XX | TD-100-120-PRO-XXB | TD-100-142-PRO-XX | TD-100-142-PRO-XXB | TD-110-170-PRO-XX | TD-110-170-PRO-XXB |
| Ratio | 51/81/101/121/161 | 51/81/101/121/161 | 51/81/101/121/161 | 51/81/101/121/161 | 51/121/161 | 51/121/161 |
| Start-stop peak Torque (N.m) | 267/376/411/436/459 | 267/376/411/436/459 | 267/376/411/436/459 | 267/376/411/436/459 | 523/802/841 | 523/802/841 |
| Max. allowable torque at average load (N.m) | 120/185/267/267/267 | 120/185/267/267/267 | 120/185/267/267/267 | 120/185/267/267/267 | 255/586/586 | 255/586/586 |
| Rated torque at 2000rpm/ (reduction ratio) | 94/146/169/169/169 | 94/146/169/169/169 | 94/146/169/169/169 | 94/146/169/169/169 | 169/363/363 | 169/363/363 |
| Output Peak Speed (RPM) | 55/37/29/24/18 | 55/37/29/24/18 | 55/37/29/24/18 | 55/37/29/24/18 | 34/14/10 | 34/14/10 |
| Rated speed (RPM) | 44/29/22/18/12 | 44/29/22/18/12 | 44/29/22/18/12 | 44/29/22/18/12 | 22/12/7 | 22/12/7 |
| Motor power (W) | 1000 | 1000 | 1000 | 1000 | 1500 | 1500 |
| Supply voltage (V) | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 | 24-48 |
| Rated current (A) | 15.8 | 15.8 | 15.8 | 15.8 | 14.1 | 14.1 |
| Max. continuous current(A) | 16.9 | 16.9 | 16.9 | 16.9 | 30.2 | 30.2 |
| Encoder Resolution (Bit) | 16/18 | 16/18 | 16 / 18 | 16 / 18 | 16 / 18 | 16 / 18 |
| Backlash (arcsec) | 20/20/10/10/10 | 20/20/10/10/10 | 20/20/10/10/10 | 20/20/10/10/10 | 20/20/10 | 20/20/10 |
| communication bus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus | Ethercat and Canbus |
| Motor length with (Dual encoders/mm) | 103±0.5 | 126.5±0.5 | 103±0.5 | 126.5±0.5 | 121.7±0.5 | 148±0.5 |
| Through hole(mm) | 32 | 32 | 32 | 32 | 40 | 40 |
| Weight(kg) | 2.51 | 3.33 | 3.8 | 4.5 | 6.85 | 7.5 |
| Torque constant(N.m/A) | 0.175 | 0.175 | 0.175 | 0.175 | 0.293 | 0.293 |
| Resistance(ohm) | 0.12 | 0.12 | 0.12 | 0.12 | 0.23 | 0.23 |
| Inductance(mH) | 0.3 | 0.3 | 0.3 | 0.3 | 0.25 | 0.25 |
| Number of pole-pairs | 8 | 8 | 8 | 8 | 15 | 15 |
| Inertia(g * c㎡) | 5962 | 7017 | 3601 | 4237 | 9242 | 11751 |
