
Home > Harmonic Robot Joint Actuator > Y Series Robot Joint Module



Y-series robotic joint Actuators enjoy higher rigidity and stable positioning accuracy even under heavy load, and provide better structural reliability, better load capacity, and cost efficiency.
Max rated torque: 135NM
Rated Speed: Max. 66.6RPM
Rated Voltage: 24-48V
Communication: CAN/ RS485


Y series joint actuators quick selection table
| Model | Y14 | Y17 | Y20 | Y25 | Y32 |
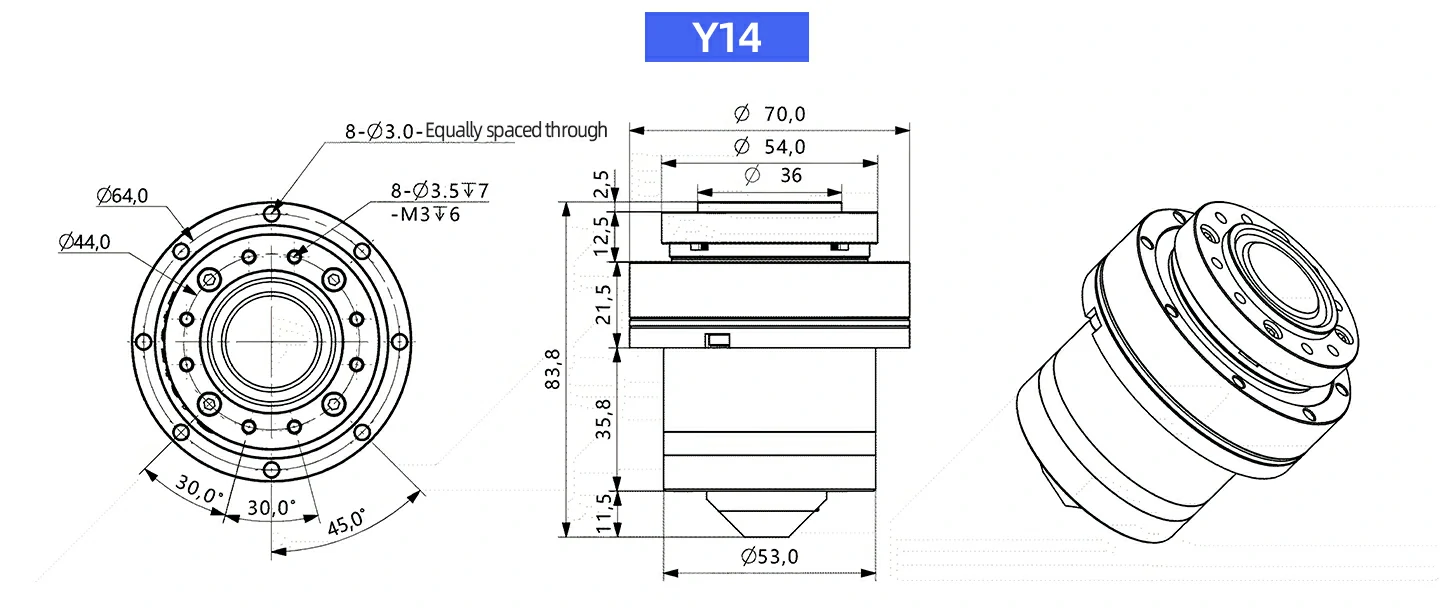
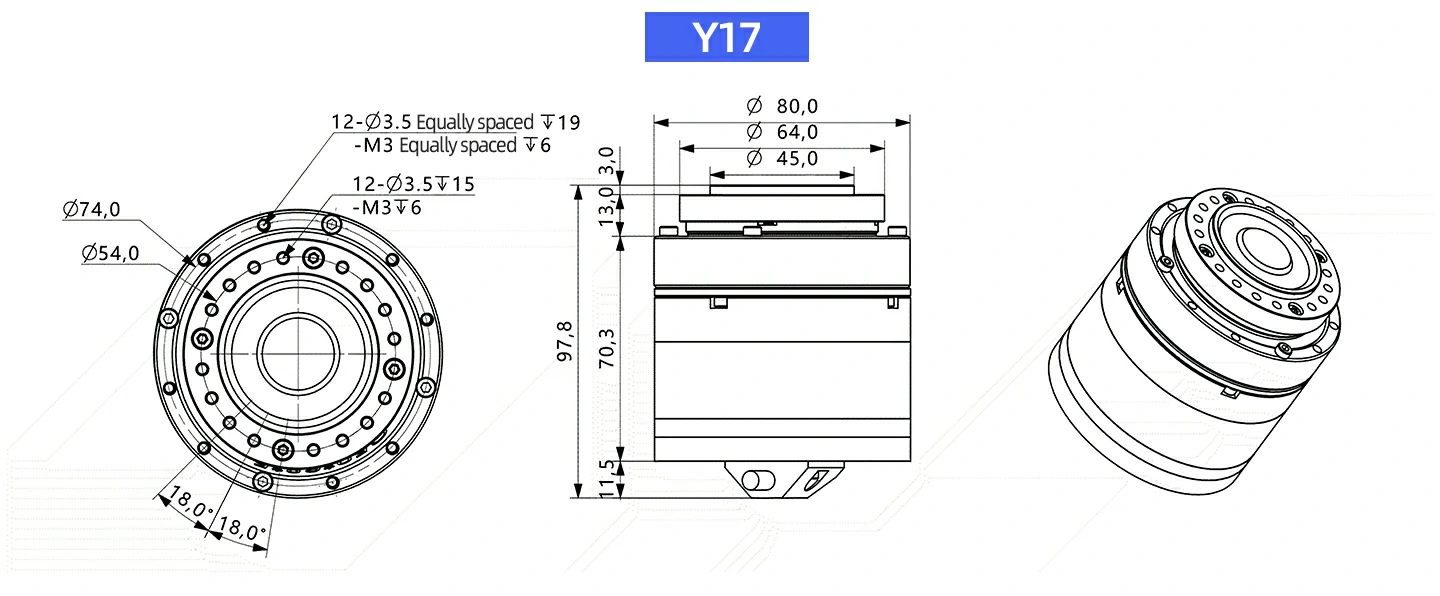
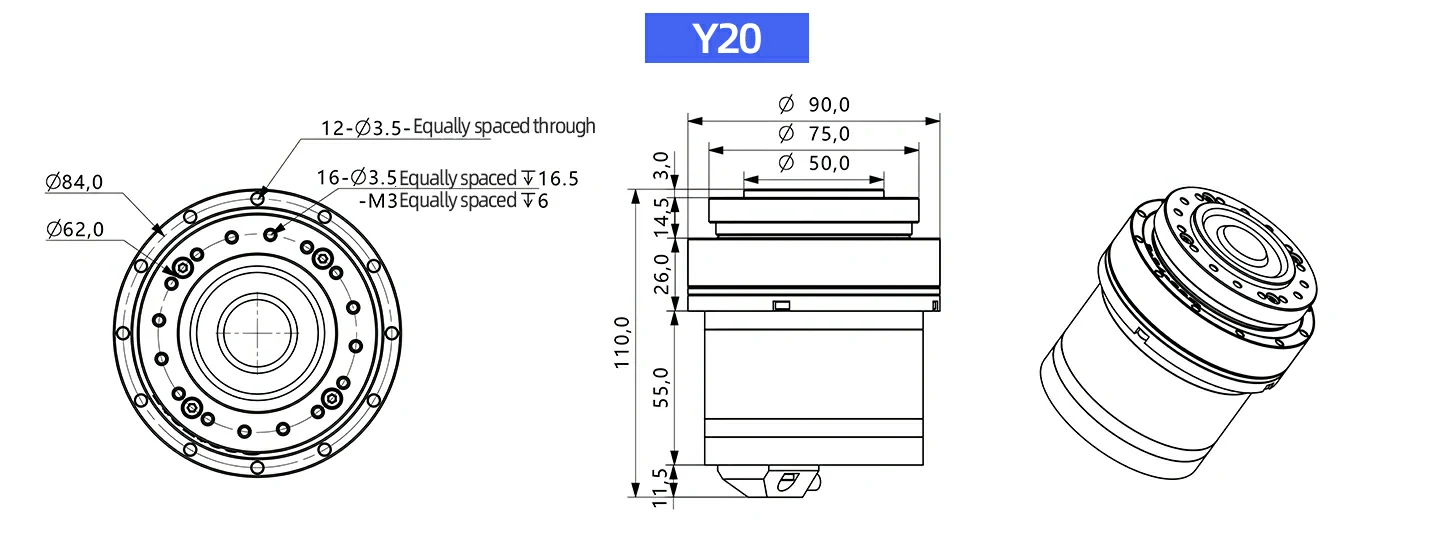
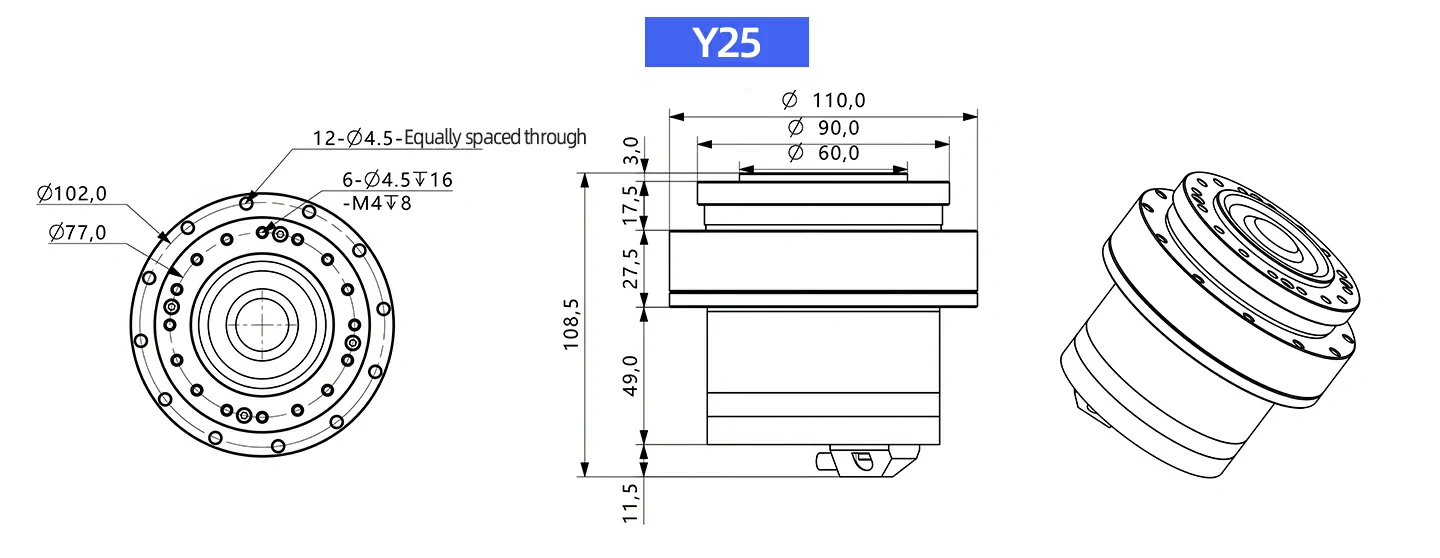
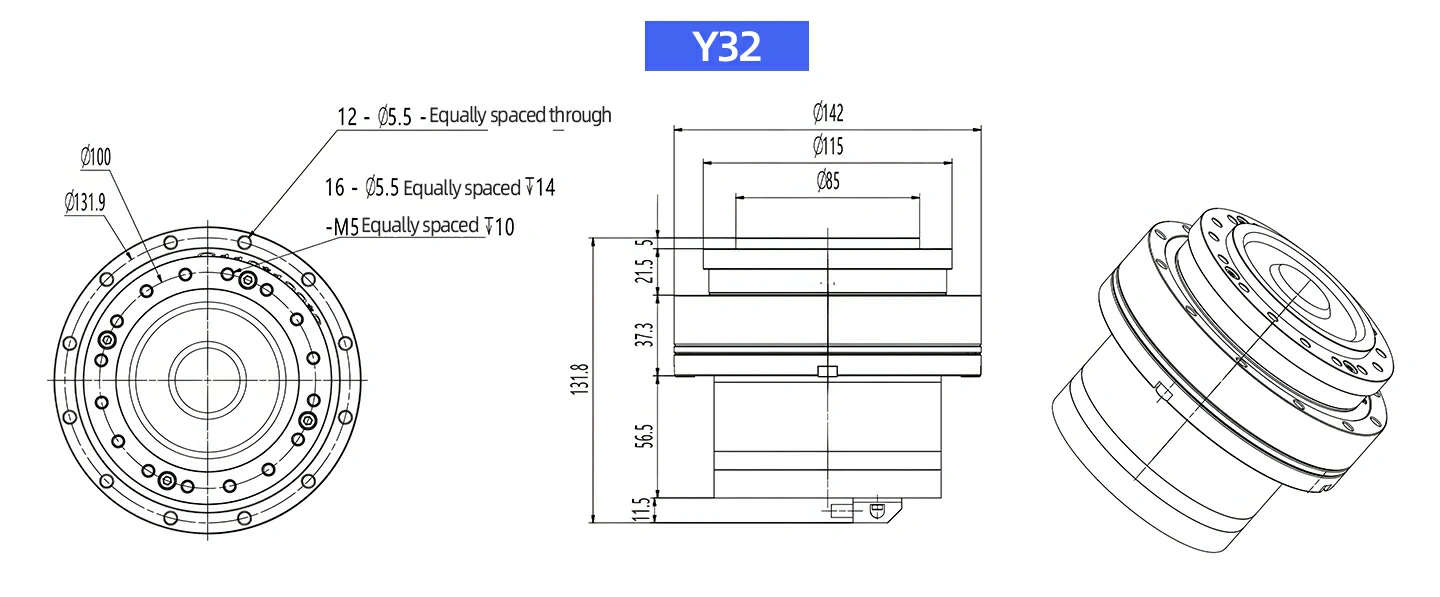
| Size | OD70*L83.8mm | OD80*L97.8mm | OD90*L110mm | OD110*L108.5mm | OD142*L131.8mm |
| Rated torque | 5/7/10/14Nm | 13/21/34/43Nm | 20/44/61/64Nm | 27/52/73/91Nm | 38/63/101/135 |
| Rated speed | 0~55/ 0~32/ 0~20/ 0~16rpm | 0~66.6/ 0~40/ 0~25/ 0~20rpm | 0~66.6/ 0~40/ 0~25/ 0~20rpm | 0~66.6/ 0~40/ 0~25/ 0~20rpm | 0~50/ 0~30/ 0~18.7/ 0~15rpm |
| Weight | 0.7kg | 1.3kg | 1.7kg | 2.3kg | 4.5kg |
| Communication | CAN/RS485 | ||||

5~135Nm Rated torque
Weight from 0.7kg to 4.5kg
Motor, Drive, Gearbox and Encoder in One Compact Unit
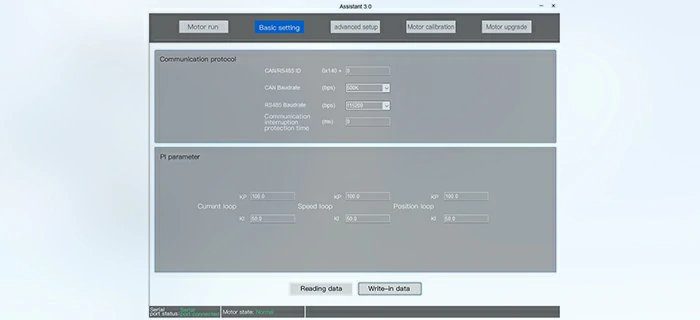
The RS485 Robot joint actuators connects to the host through the USB to RS485 device, and the CAN joint connects to the USB to serial port device through the 4p communication cable.

The resistance performance of the actuator is relatively strong, and the impact acceleration can reach 300m/s2.
The actuator is subjected to 2H vibration test, and the vibration acceleration is 25m/s2 (frequency 10-400Hz).

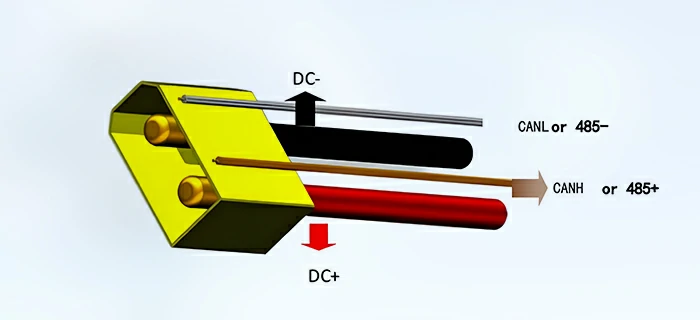
| Definition | Wire color | Wire diameter | Quantity | Power |
| DC+ | Red | 18AWG | 1 | Positive |
| DC- | Black | 18AWG | 1 | Negative |
| CANH/485+ | Yellow | 22AWG | 1 | H/+ |
| CANL/485- | White | 22AWG | 1 | L/- |
CNC

Industrial robot

Pick & Place robot

Quadruped robot dog
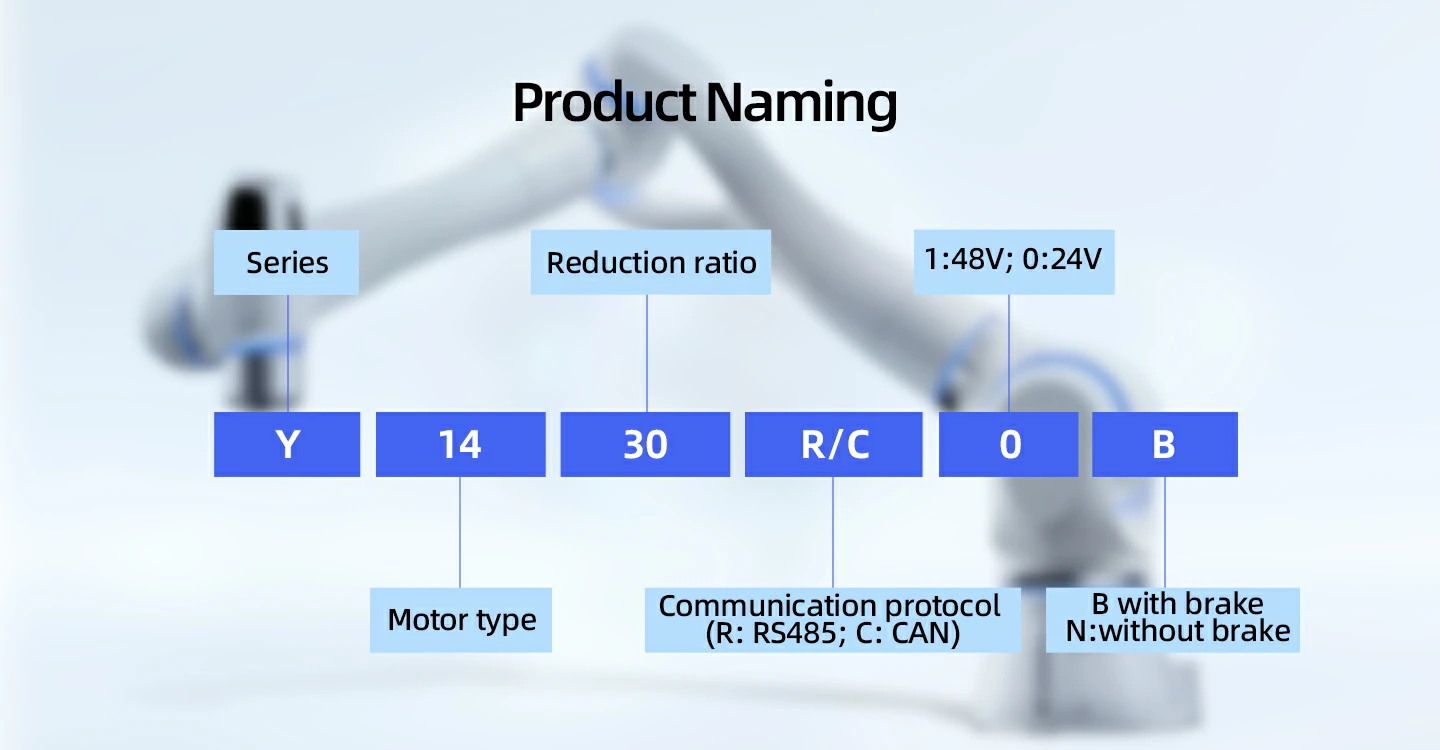
| Y14-XX-X-X-X | Y17-XX-X-X-X | Y20-XX-X-X-X | Y25-XX-X-X-X | Y32-XX-X-X-X | |||||||||||||||||
| Whole parameter | Rated voltage(V) | 18-24(rated 24V) | 36-48(rated 48V) | 36-48(rated 48V) | 36-48(rated 48V) | 48V | |||||||||||||||
| Rated current(A) | 2 | 4 | 5 | 5 | 10 | ||||||||||||||||
| Peak current(A) | 5.1 | 9 | 11 | 11 | 15 | ||||||||||||||||
| Output speed range(RPM) | 0~55 | 0~32 | 0~20 | 0~16 | 0~66.6 | 0~40 | 0~25 | 0~20 | 0~66.6 | 0~40 | 0~25 | 0~20 | 0~66.6 | 0~40 | 0~25 | 0~20 | 0-50 | 0-30 | 0-18.7 | 0-15 | |
| Output peak speed(RPM) | 75 | 44 | 28 | 22 | 83 | 50 | 32 | 25 | 83 | 50 | 32 | 25 | 83 | 50 | 32 | 25 | 60 | 36 | 22.5 | 18 | |
| Dimension(OD*H)(mm) | 70*83.8 | 80*97.8 | 90*110 | 110*108.5 | 142*131.8 | ||||||||||||||||
| Weight(kg) | 0.7 | 1.3 | 1.7 | 2.3 | 4.5 | ||||||||||||||||
| Reducer parameter | Reduction ratio | 30 | 50 | 80 | 100 | 30 | 50 | 80 | 100 | 30 | 50 | 80 | 100 | 30 | 50 | 80 | 100 | 30 | 50 | 80 | 100 |
| Rated output torque(@48V)(NM) | 5 | 7 | 10 | 14 | 13 | 21 | 34 | 43 | 20 | 44 | 61 | 64 | 27 | 52 | 73 | 91 | 38 | 63 | 101 | 135 | |
| Instantaneous maximum allowable torque(@48V)(NM) | 15 | 25 | 30 | 46 | 40 | 63 | 101 | 122 | 50 | 127 | 165 | 170 | 63 | 115 | 160 | 210 | 99 | 167 | 260 | 350 | |
| Backlash(arcsec) | <20 | <20 | <20 | <20 | <20 | ||||||||||||||||
| Motor parameter | Torque (NM) | 0.2 | 0.6 | 0.9 | 1.2 | 1.8 | |||||||||||||||
| Rated speed(RPM) | 1600 | 2000 | 2000 | 2000 | 1500 | ||||||||||||||||
| Max. speed(RPM) | 2200 | 2500 | 2500 | 2500 | 1800 | ||||||||||||||||
| Power(W) | 35 | 150 | 200 | 250 | 480 | ||||||||||||||||
| Encoder parameter | Type | 18-bit resolution multi-turn absolute encoder (motor end) | 18-bit resolution multi-turn absolute encoder (motor end) | 18-bit resolution multi-turn absolute encoder (motor end) | 18-bit resolution multi-turn absolute encoder (motor end) | 18-bit resolution multi-turn absolute encoder (motor end) | |||||||||||||||
| Whether the driver board is integrated with an encoder | Yes | Yes | Yes | Yes | Yes | ||||||||||||||||
| Install way | Shaft mounting | Shaft mounting | Shaft mounting | Shaft mounting | Shaft mounting | ||||||||||||||||
| Resolution(bit) | 18 | 18 | 18 | 18 | 14 | ||||||||||||||||
| Angular output delay(us) | 2 | 2 | 2 | 2 | 2 | ||||||||||||||||
| communication interface | mode | CAN/RS485 | CAN/RS485 | CAN/RS485 | CAN/RS485 | CAN/RS485 | |||||||||||||||
| Baud rate(bps) | Optional | Optional | Optional | Optional | Optional | ||||||||||||||||
| Brake | / | No | Yes | Yes | Yes | Yes | |||||||||||||||
| Protect function | / | Over voltage/Under voltage/Over current/over temperature (optional)/blocking protection/power failure memory | Over voltage/Under voltage/Over current/over temperature (optional)/blocking protection/power failure memory | Over voltage/Under voltage/Over current/over temperature (optional)/blocking protection/power failure memory | Over voltage/Under voltage/Over current/over temperature (optional)/blocking protection/power failure memory | Over voltage/Under voltage/Over current/over temperature (optional)/blocking protection/power failure memory | |||||||||||||||