


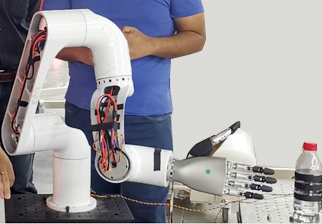
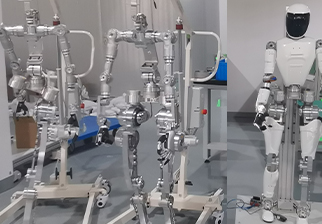
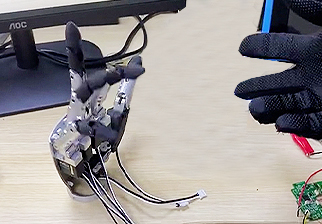
6 Degrees of Freedom Intelligent Bionic Hand is integrated with Avatar’s Self-developed steering gear motors, and somatosensory control technology, the hand gesture robot can be controlled by Can and RS485 communication protocol , also can be programmed by Python, ROS, and C++ code.
6 Degree of fredom
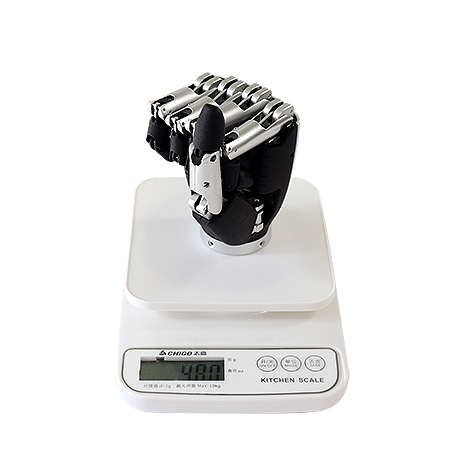
Weight : 480g
Operating Voltage: DC12V±10%
Communication: Can , RS485
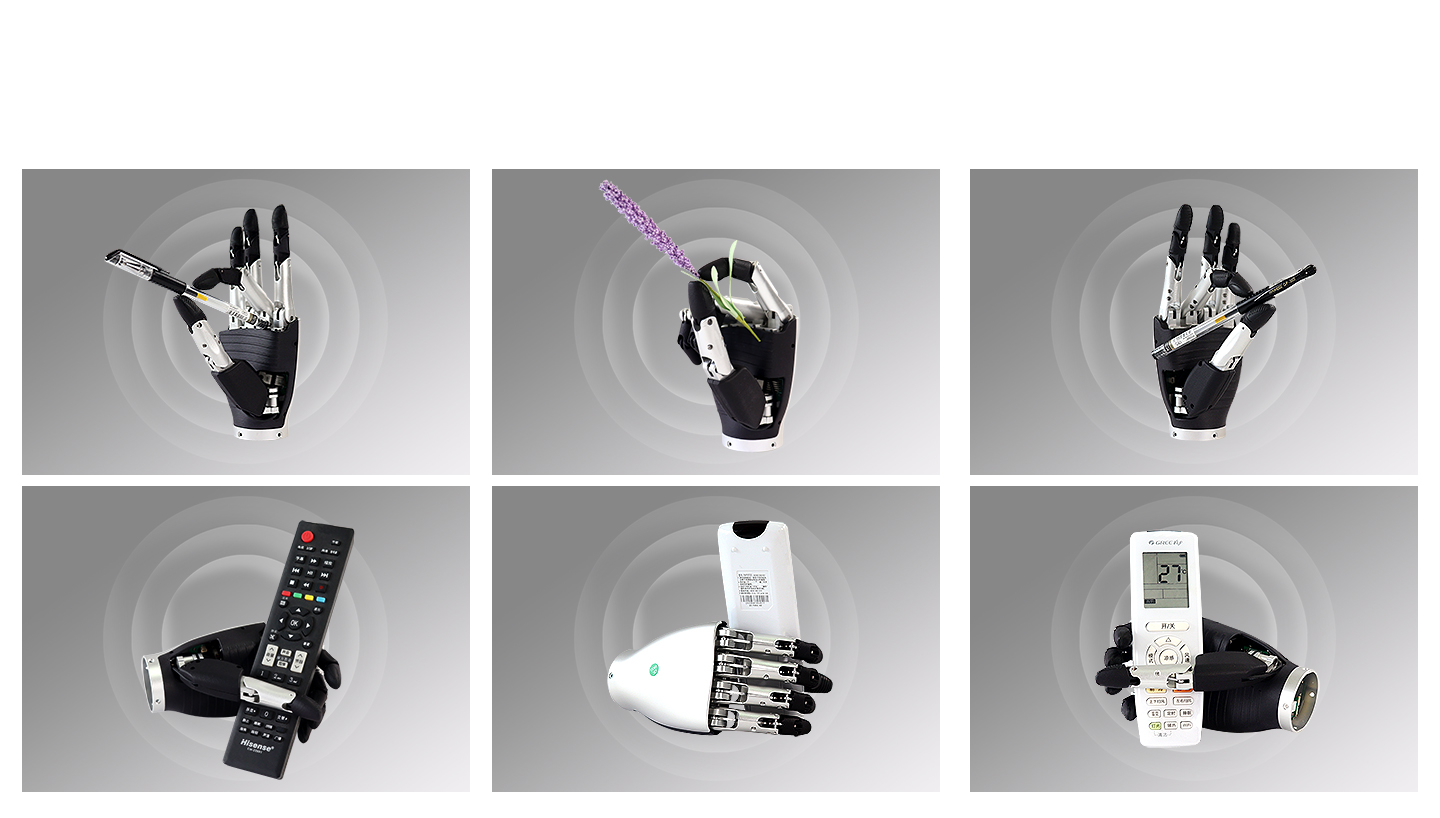
Avatar intelligent bionic hand combining bionics, mechatronics, materials science, biomedicine and information technology, equipped with self-developed motion control technology, dexterous robot hand can also be as flexible as the humanoid hand.

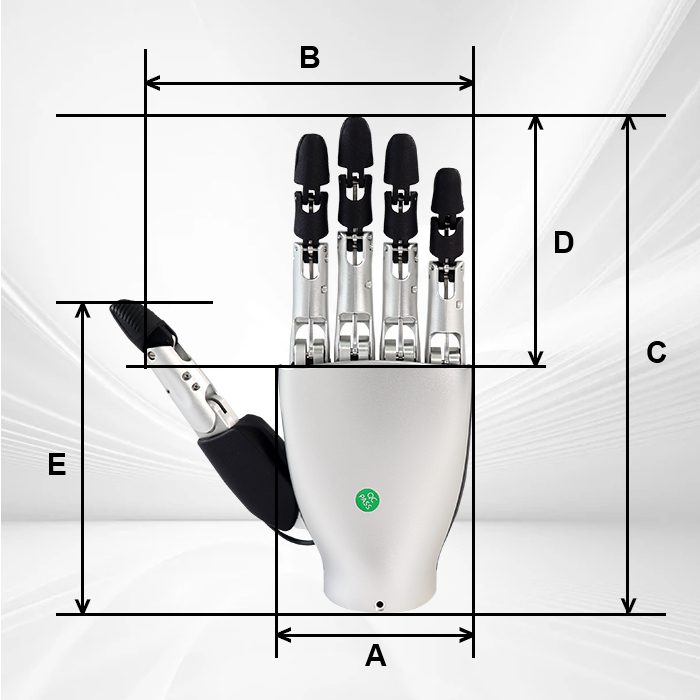
| A palm | 80mm | ||
| B Maximum hand width | 132mm | ||
| C Length of hand (including fingers) | 205mm | ||
| D Finger length | 97mm | ||
| E Thumb to hand bottom | 132mm | ||
| Benefits comparing with other Brands | |||
| Parameter | Avatar | Foreign manufacturers | Domestic manufacturers |
| Number of finger joints | 3 | 2 | 2 |
| Freedom | 6 | 5 | 5 |
| Motor type | Foc brushless motor | Electric motor with brush hollow cup |
Electric motor with brush hollow cup |
| Electromyographic sensor type | Array | Non-array | Non-array |
| CG Boost adaptive system | Have | No have | No have |



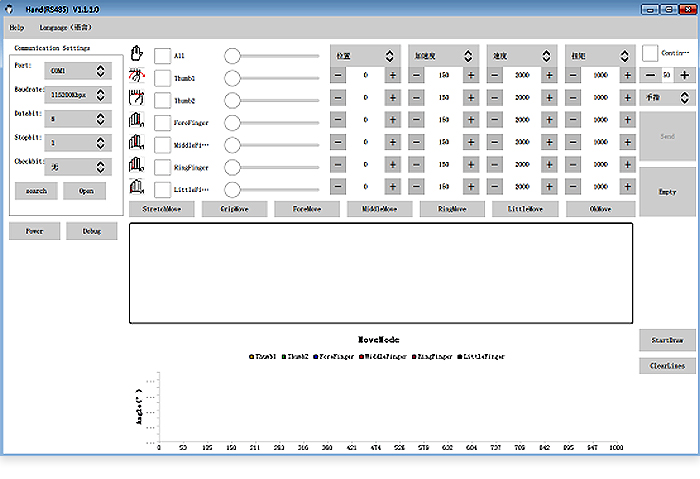
RS485 Communication Protocol
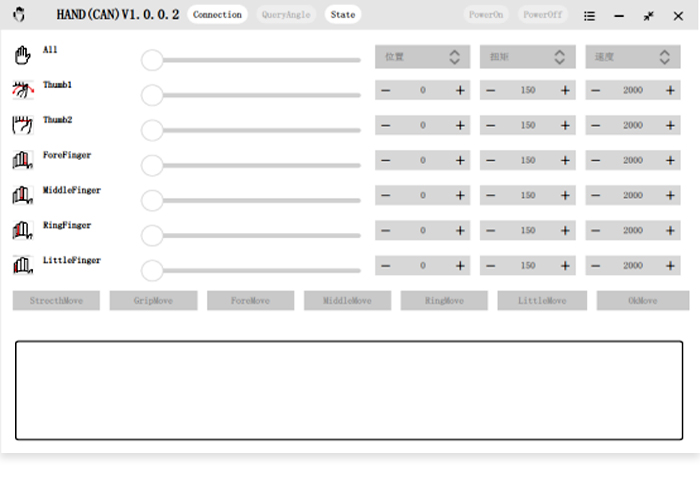
CAN Communication Protocol

| Cool hand | TD-RH-1-L/R | TD-RH-1-L/R-BT |
| Left Right hand | Left hand/ Right hand | Left hand/ Right hand |
| Palm length | 80mm | 80mm |
| Maximum hand width | 132mm | 132mm |
| Hand length | 205mm | 205mm |
| Finger length | 97mm | 97mm |
| Fingertip stress | 10N | 10N |
| Maximum thumb stress | 12N | 12N |
| freedom | 6 | 6 |
| Weight | 480g | 480g |
| Operating voltage | DC12V±10% | DC12V±10% |
| Quiescent current | 200mA | 200mA |
| Maximum current | 3A | 3A |
| Joints number | 5 | 5 |
| Communication interface | RS485/Can | RS485+Bluetooth/Can |
| Thumb lateral rotation range | 90° | 90° |
| Finger lateral swing speed | 0-6000 (steps/s) 90° is 1024 steps | 0-6000 (steps/s) 90° is 1024 steps |